راهنمای کاربر PhotoRobot Robotic Arm V8

کتابچه راهنمای نصب زیر دستورالعمل های فنی برای پیکربندی و عملکرد بازوی رباتیک V8 توسط PhotoRobot ارائه می دهد. هدف این اطلاعات پشتیبانی از اولین راه اندازی و بهره برداری از بازوی رباتیک توسط مشتری است. این بر مشتریان جدیدی که اخیرا دستگاه را خریداری کرده اند و همچنین ورود آینده اپراتورهای خط تولید تمرکز دارد.
مهم: همیشه قبل از اقدام به هر گونه نصب خود، اولین استفاده، ذخیره سازی یا خدمات دستگاه های PhotoRobot به اطلاعات و دستورالعمل های ایمنی PhotoRobot مراجعه کنید.
نصب بازوی رباتیک V8 و اولین استفاده
از اینکه دستگاه PhotoRobot خود را خریداری کردید متشکریم. شما محصولی را انتخاب کرده اید که چندین دهه تجربه حرفه ای و نوآوری را با خود به همراه دارد. طراحی مبتکرانه و شیک، PhotoRobot با شما در ذهن است. این بدان معناست که هر زمان که از PhotoRobot استفاده می کنید، می توانید مطمئن باشید که هر بار به نتایج عالی خواهید رسید. به PhotoRobot خوش آمدید.
1. توضیحات محصول
موتور Robotic Arm V8 برای ضبط خودکار چرخش های چند ردیفه یا عکاسی سریع از مجموعه ای از تصاویر ثابت از ارتفاعات مختلف طراحی شده است. این دستگاه قادر است دوربین را با دقتی رباتیک و روان در دو محور حرکت دهد و ارتفاع و نوسان را کنترل کند. آرم با دستگاه های گرامافون عکاسی سازگار مانند میز بدون مرکز ، همچنین گرامافون رباتیک، گرامافون های کلاس C و موارد دیگر ترکیب می شود. این کار ضبط تصویر را با حرکت دوربین نصب شده و چرخش محصول روی صفحه گردان هماهنگ می کند.

اجزای کلیدی بازوی رباتیک V8 عبارتند از:
- واحد کنترل سیستم (یک دستگاه جداگانه برای کنترل بازوی رباتیک).
- ساقه های نصب دوربین (یک ساق کوتاه، یک ساقه بلند یا هر دو).
- پایه دستگاه بازوی رباتیک با چرخ های جمع شونده برای حمل و نقل آسان.
- ایستگاه اتصال برای راه اندازی سریع با صفحه های گردان و دستگاه های سازگار.
توجه داشته باشید: بازوی دوربین نوسان نمی کند و دوربین را در یک مسیر دقیق حرکت می دهد. همچنین محدوده نصب بزرگی برای انعطاف پذیری در انتخاب سر سه پایه و دوربین ها و ویژگی هایی برای حمل و نقل و راه اندازی بدون دردسر وجود دارد.
1.1. بررسی اجمالی ربات بازوی رباتیک V8
دستگاه بازوی رباتیک از طریق واحد کنترل کنترل می شود. این بدان معناست که واحد کنترل تمام حرکت _Arm V8 را روشن و کنترل می کند.

توجه داشته باشید: واحد کنترل جزء فیزیکی این دستگاه نیست. اگر با هم تحویل داده شود، به صورت فیزیکی در میز بدون مرکز نصب می شود. اگر Arm V8 به طور جداگانه تحویل داده شود، واحد کنترل در جعبه اختصاصی قفسه PhotoRobot HD قرار می گیرد.
1.2 اتصال برق
الزامات اتصال الکتریکی زیر نیز باید برای نصب و راه اندازی ایمن بازوی رباتیک V8 رعایت شود.
- دستگاه باید به زمین متصل باشد.
- همیشه از یک سوکت ضد ضربه که به درستی نصب شده است استفاده کنید.
- اطمینان حاصل کنید که اطلاعات الکتریکی روی پلاک رتبه بندی با منبع تغذیه مطابقت دارد. اگر اینطور نیست، با یک برقکار تماس بگیرید.
- مطمئن شوید که به دوشاخه برق یا کابل برق آسیب نرسانید.
- دوشاخه برق را فقط در انتهای نصب به پریز برق وصل کنید. اطمینان حاصل کنید که پس از نصب به دوشاخه برق دسترسی دارد.
- کابل برق یا دوشاخه برق را با دست خیس لمس نکنید.
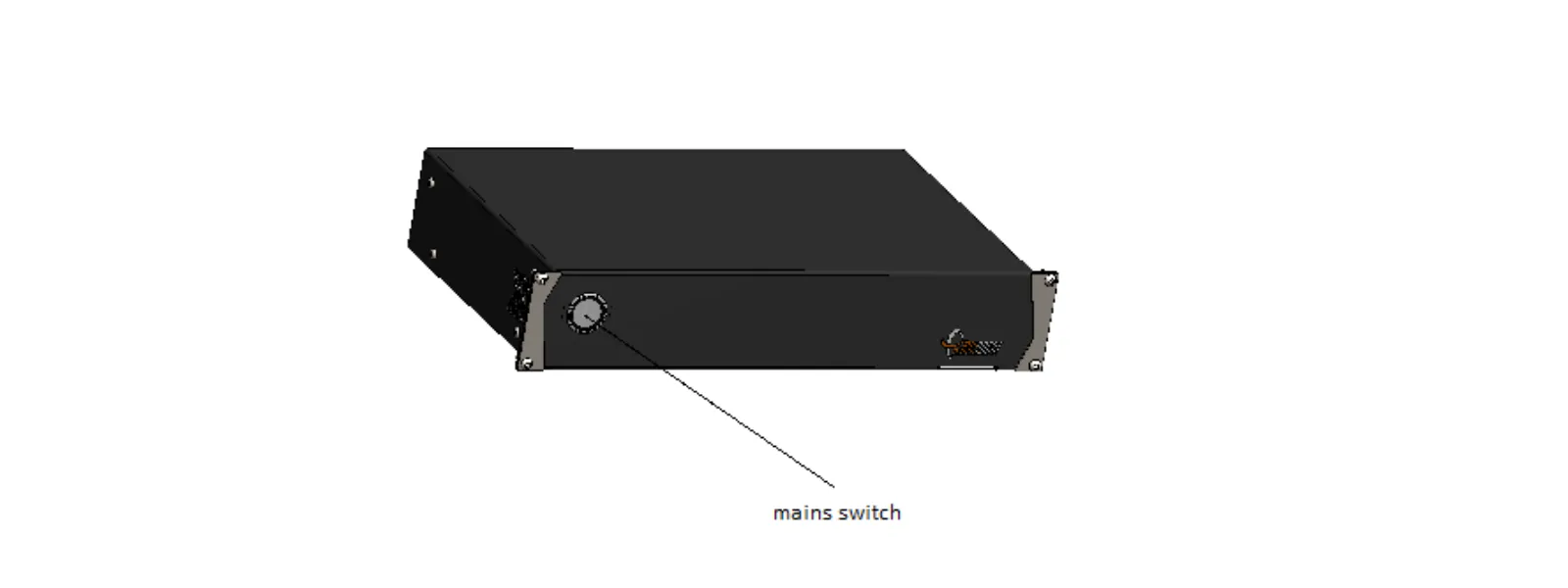
- کابل برق را نکشید تا دستگاه جدا شود. همیشه ابتدا کلید برق را در واحد کنترل فشار دهید.
- هنگام حرکت یا روشن شدن به _Arm V8 نزدیک نشوید.
- همیشه به محل کار این دستگاه توجه کنید.
- محدوده آسانسور 32 سانتی متر است.
- محدوده بازوی نوسان از 0 تا 90 درجه است.
مهم: اولین نصب پس از تحویل از سازنده فقط باید توسط یک مرجع مجاز PhotoRobot انجام شود. مرجع باید یک توزیع کننده تایید شده یا خود سازنده باشد. برای نصب و راه اندازی خود ، همیشه قبل از ادامه به اطلاعات و دستورالعمل های ایمنی PhotoRobot نیز مراجعه کنید.
2. آماده سازی _Arm V8 برای بهره برداری
2.1. بر اساس پیکربندی ارائه شده، می تواند یک ساقه کوتاه، یک ساقه بلند یا هر دو وجود داشته باشد.
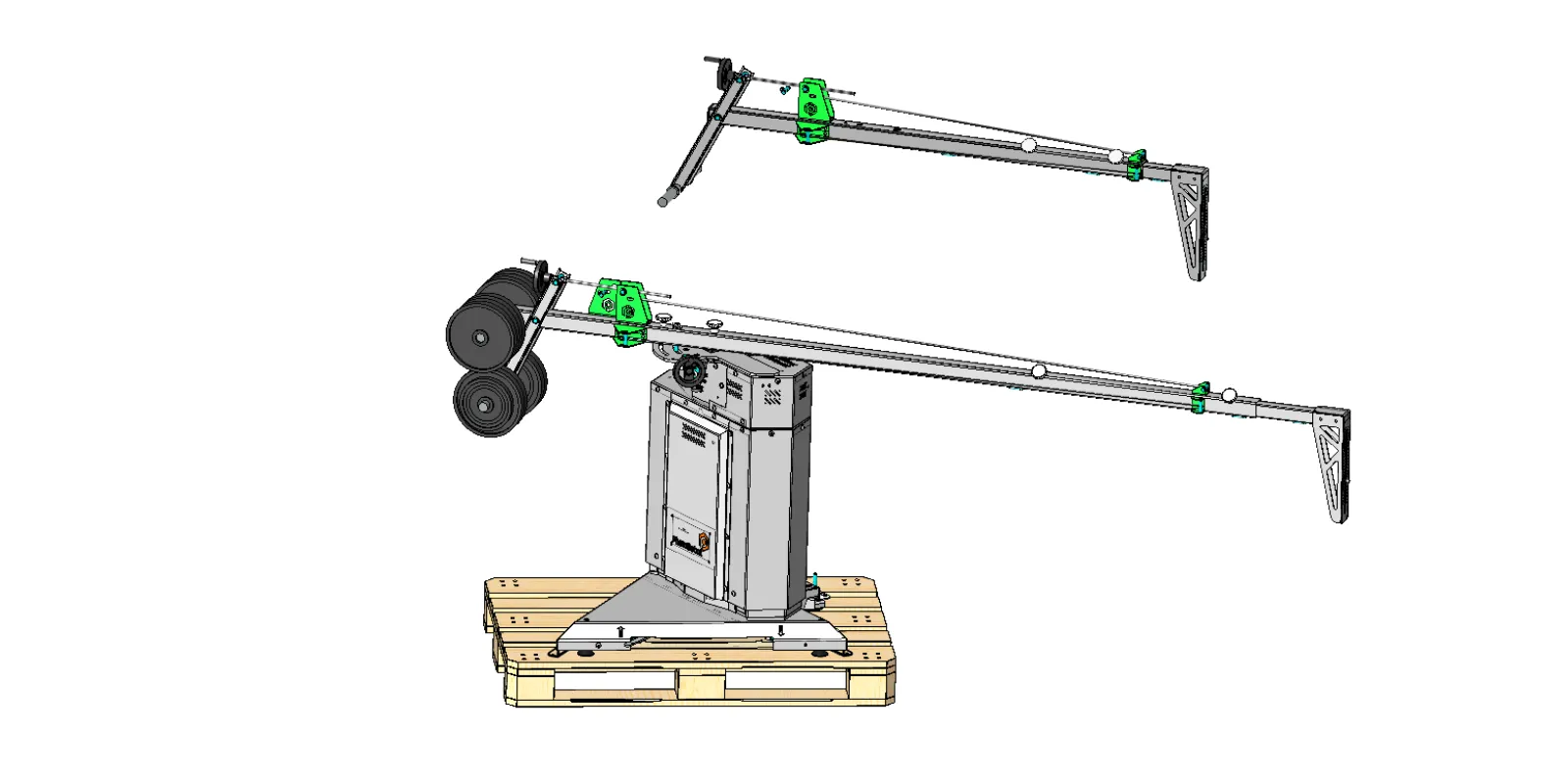
2.2. تمام قطعات را از بسته بندی خارج کرده و پایه را از پالت خارج کنید.
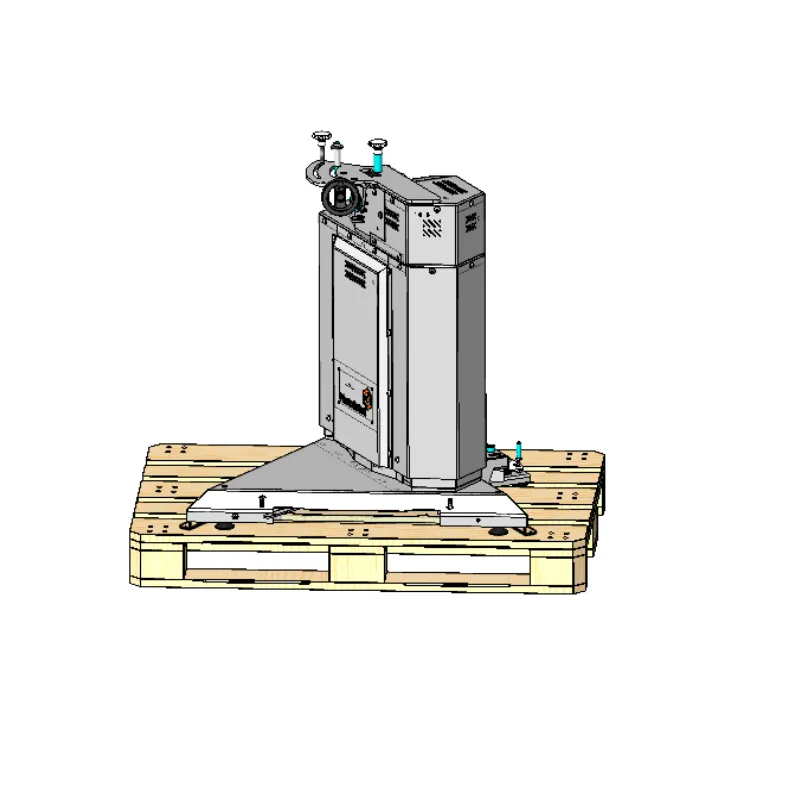
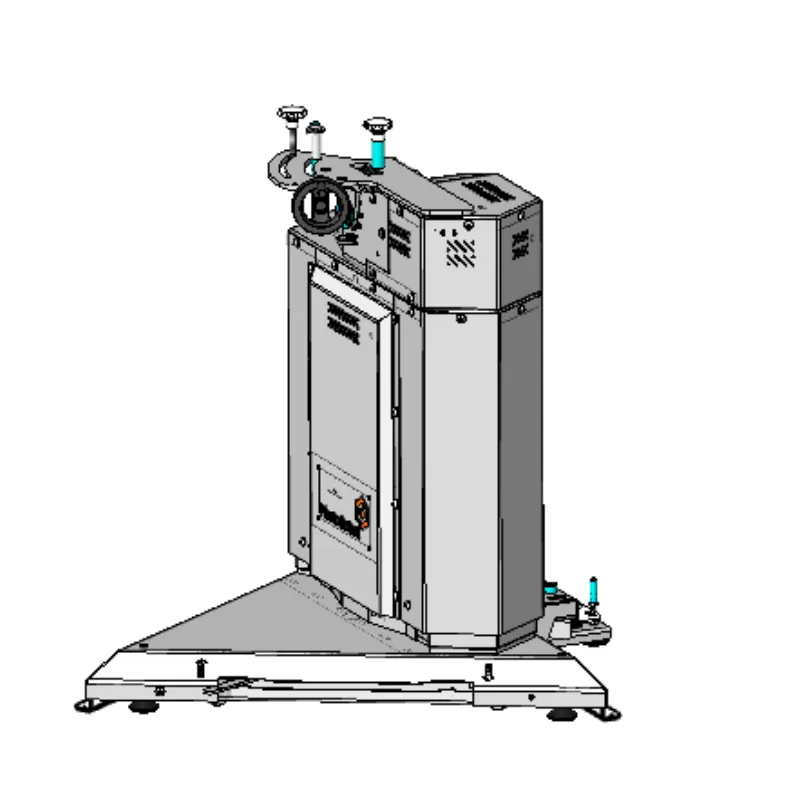
2.3. قسمت بالایی _Arm V8 را برای نصب ساقه پیکربندی کنید. لوازم جانبی ثابت مانند آجیل و واشر را بردارید.
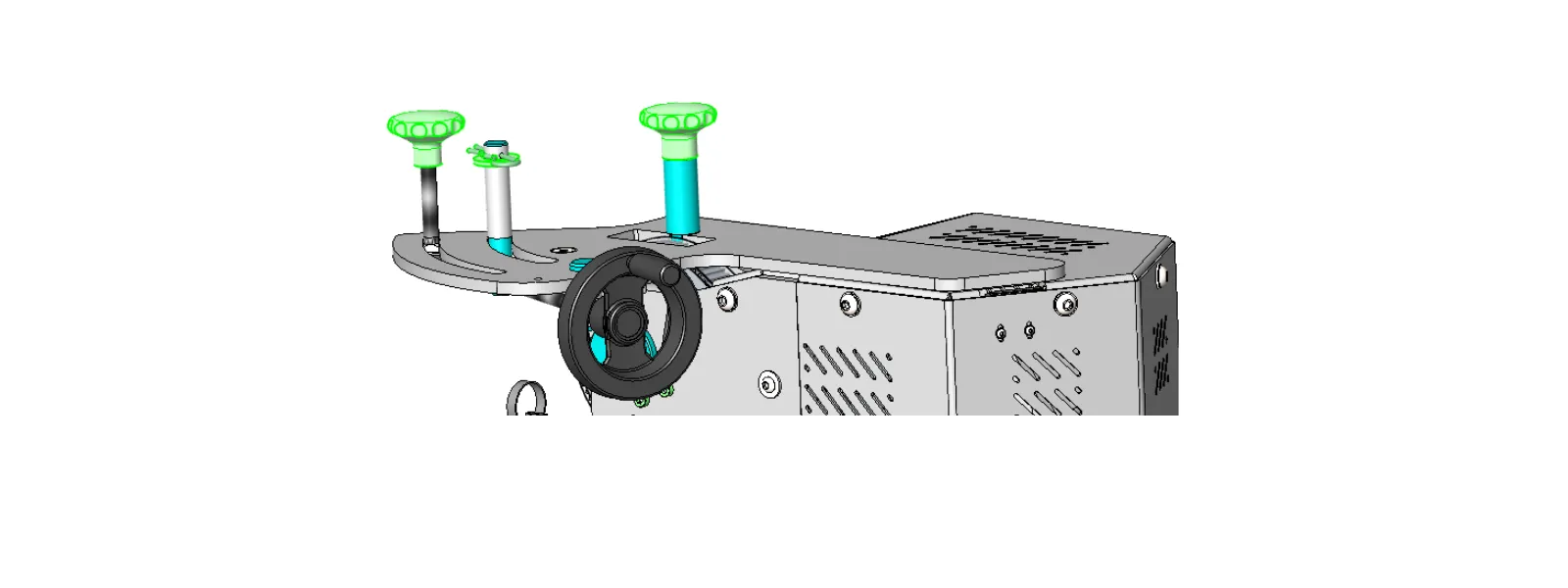
2.4. ساقه را روی پایه بازو قرار دهید و تمام قسمت های محافظ را ببندید.
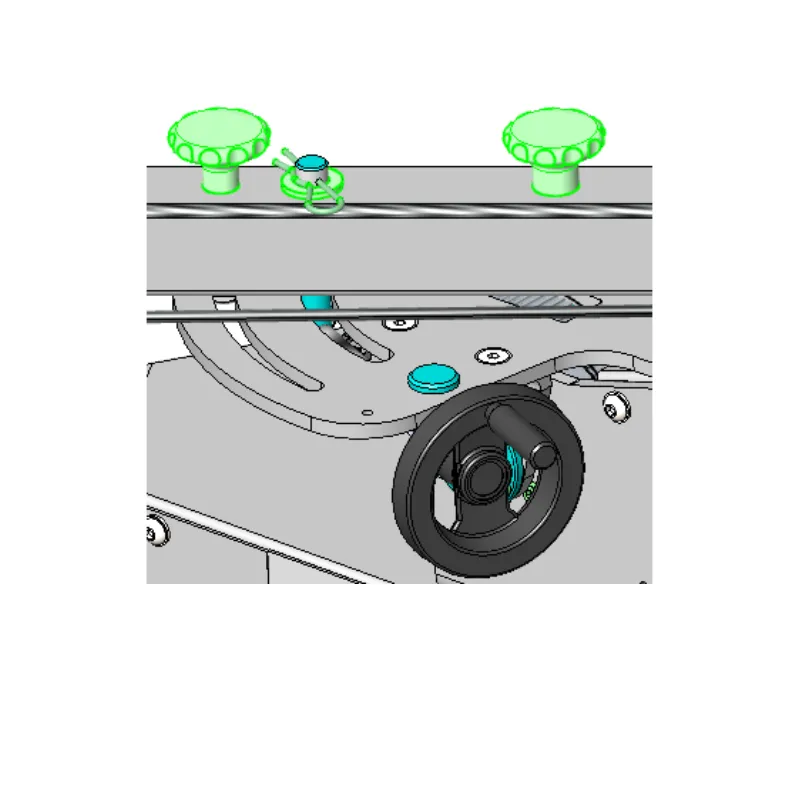
2.5. سر دنده Manfrotto را بازیابی کرده و آن را برای نصب بر روی بازو آماده کنید.

2.6. سر دنده ای Manfrotto را با پیچاندن آن روی ساقه وصل کنید و سپس با استفاده از دسته های قابل تنظیم 1،2،3 آن را تراز کنید.

2.7. دوربین را روی سر دنده Manfrotto نصب کنید و مقداری وزنه را روی طرف مقابل ساقه اضافه کنید. این وزن ها باید وزن دوربین را جبران کنند.
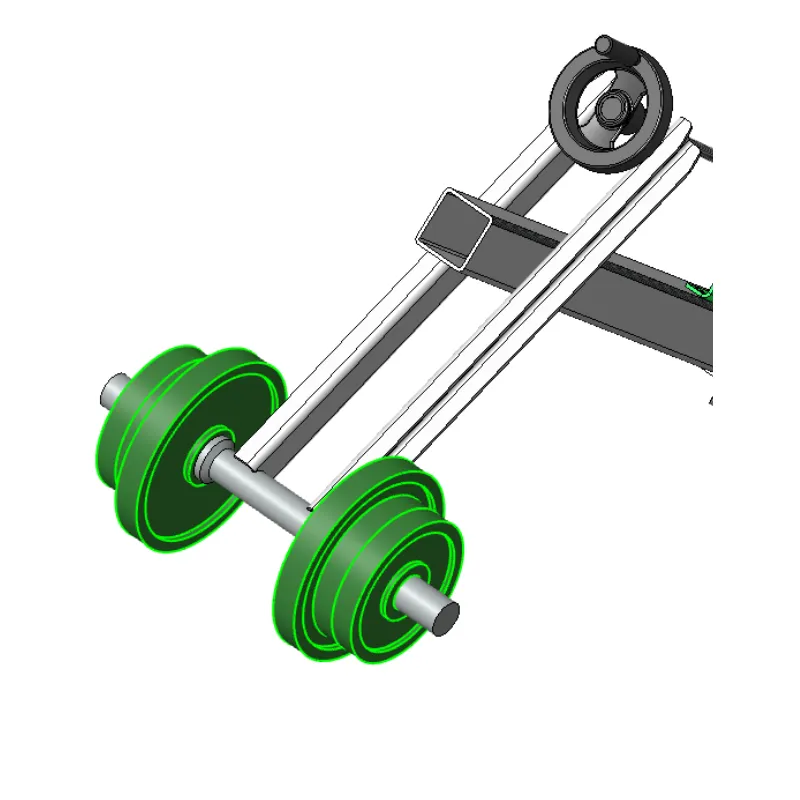
2.8. توجه داشته باشید که وزن دوربین باید کمی غالب باشد تا زمانی که بازوی چرخان در موقعیت پایین قرار دارد (صفر درجه) سوئیچ انتهایی را فشار دهید.
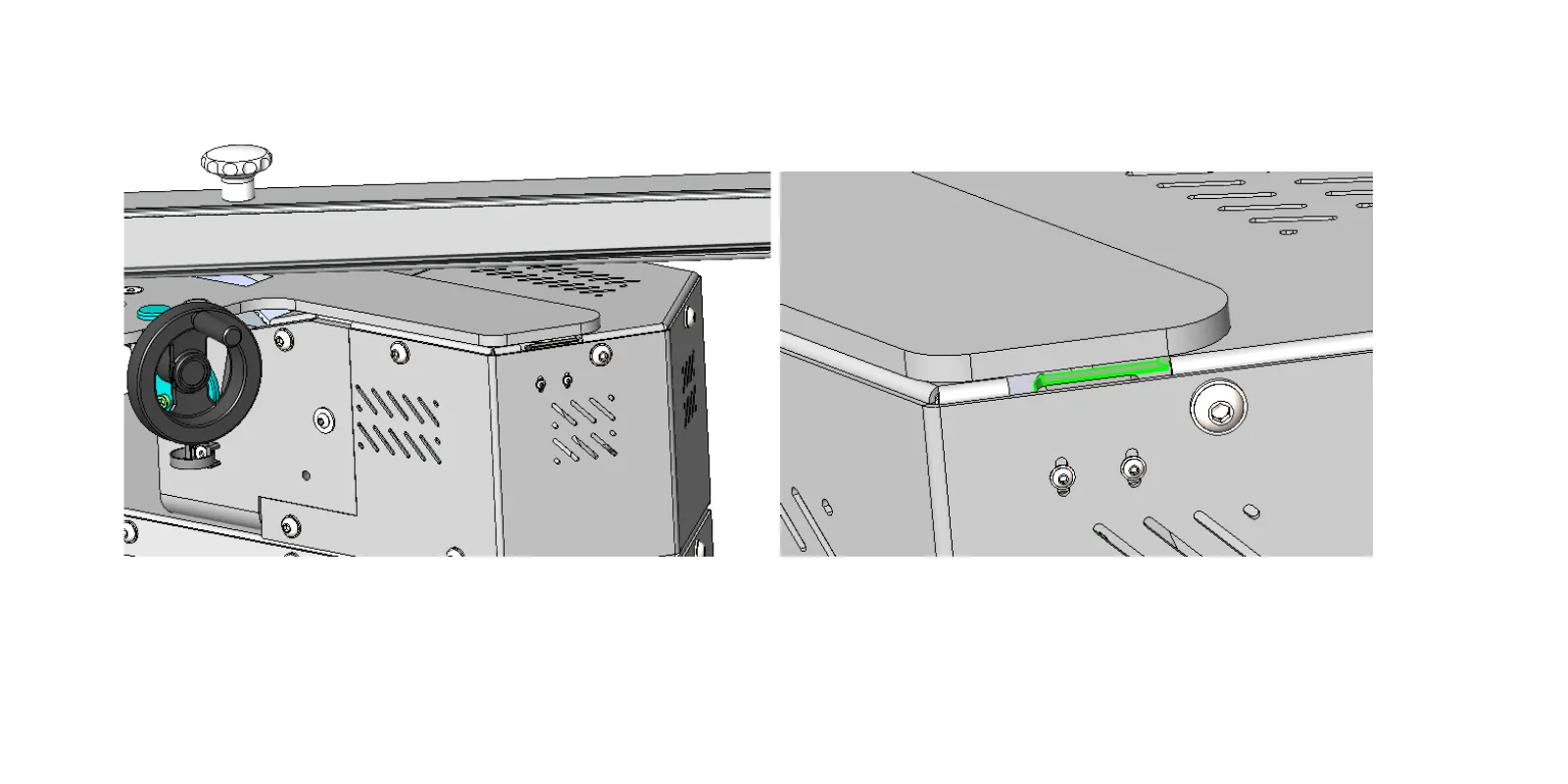
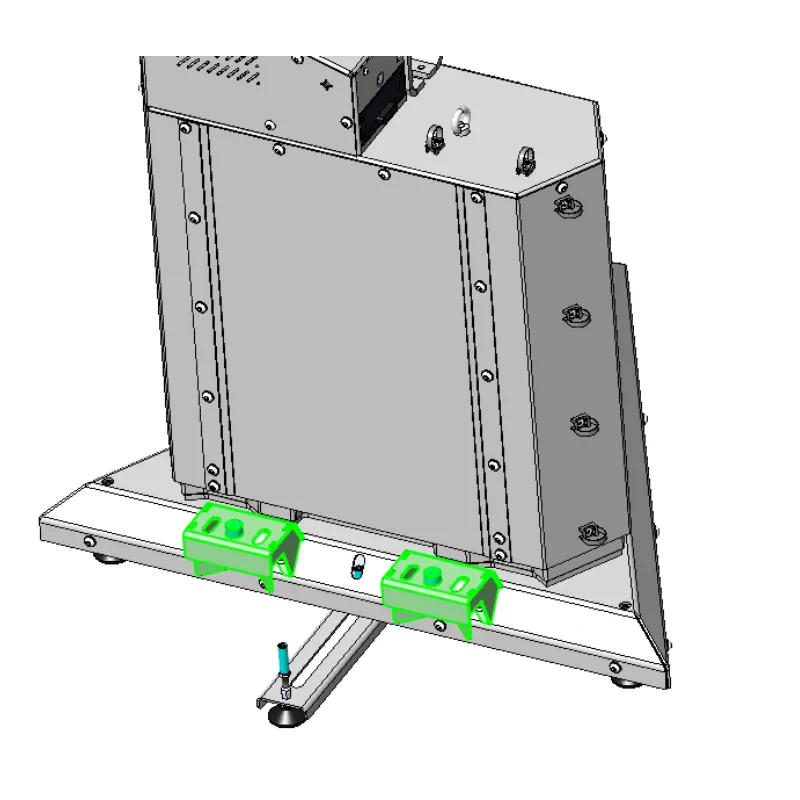
2.9. دو قسمت مکانیزم اتصال را روی _Arm V8 نصب کنید.
3. اولین استفاده از PhotoRobot
قبل از اولین استفاده، مفهوم این راه حل را درک کنید. PhotoRobot یک تجهیزات انقلابی و همه کاره برای خودکارسازی عکاسی است. از نظر فنی، این یک واحد ماژولار متشکل از سخت افزار و نرم افزار است. انتظار می رود خود PhotoRobot به همان شبکه ای متصل باشد که کامپیوتر آن را اداره می کند.
مهم: همیشه برای نیازهای فنی عملیاتی و دستورالعمل های اتصال PhotoRobot به شبکه به PhotoRobot First Use & Basic Testing مراجعه کنید.
به طور کلی، پیش نیازهای زیر وجود دارد که باید رعایت شود.
- باید یک واحد کنترل PhotoRobot متصل به شبکه محلی وجود داشته باشد.
- یک کامپیوتر برای اجرای رابط کاربری گرافیکی سرویس یا نرم افزار اپراتور به نام _Controls ضروری است.
- کامپیوتر باید به همان شبکه واحد کنترل PhotoRobot متصل باشد.
- شبکه باید به اینترنت متصل باشد.
پارامترهای سیستم توزیع برق، به عنوان مثال ولتاژ و فرکانس را بررسی کنید.
واحد کنترل را از طریق کابل اترنت به شبکه وصل کنید. کانکتور RJ45 در پشت واحد کنترل قرار دارد. الزامات اساسی شبکه زیر وجود دارد:
- سرور DHCP در شبکه انتظار می رود.
- ارتباط پورت های TCP 7777، 7778 باید مجاز باشد.
- پخش UDP در پورت 6666 باید مجاز باشد.
- اتصال به اینترنت مورد نیاز است.
- *. دسترسی photorobot.com باید مجاز باشد.
- دسترسی as-unirobot.azurewebsites.net باید مجاز باشد.
- در صورت لزوم برای اطلاعات بیشتر به پیش نیازهای شبکه دقیق PhotoRobot مراجعه کنید.
- دوشاخه برق را به پریز برق وصل کنید.
کلید برق را در پنل جلویی واحد کنترل فشار دهید. هنگامی که وضعیت آن را از یک چراغ چشمک زن به یک نور ثابت تغییر می دهد, آن را آماده برای بهره برداری است.
3.1. آدرس IP PhotoRobot را در LAN پیدا کنید
برنامه های پشتیبانی برای جستجوی PhotoRobot در شبکه وجود دارد.
- Windows - frfind برای ویندوز
- Mac OS X - frfind برای macOS
- اندروید - PhotoRobot Locator در Google Play
- آیفون، آی پد - PhotoRobot Locator در iTunes
3.2. تست اولیه PhotoRobot
در رایانه، یک مرورگر وب را باز کنید و آدرس IP PhotoRobot را در قالب URL وارد کنید، به عنوان مثال: https://11.22.33.44 (لطفا توجه داشته باشید، این آدرس فقط یک مثال است - آدرس IP را که در بخش بالا پیدا کرده اید وارد کنید).
اگر همه چیز همانطور که انتظار می رود کار کند، یک رابط کاربری اولیه مشابه نمودار زیر را مشاهده خواهید کرد:

موتورها را روشن کنید (فلش 1) و سعی کنید هر قسمت متحرک ربات را کار کنید (فلش 2). اگر ربات بر اساس دستورالعمل های شما حرکت می کند، آماده استفاده منظم از دستگاه PhotoRobot خود هستید.


سری EOS Rebel


سری EOS DSLR


سری بدون آینه EOS M


سری PowerShot


نمای نزدیک / دستی

سری Canon EOS Rebel دوربین های DSLR مناسب برای مبتدیان را با کیفیت تصویر خوب، کنترل های بصری و ویژگی های همه کاره ارائه می دهد. این دوربین ها که برای علاقه مندان به عکاسی ایده آل هستند، فوکوس خودکار قابل اعتماد، صفحه نمایش لمسی با زاویه متغیر و ضبط ویدیوی Full HD یا 4K را ارائه می دهند.
اتصال
وضوح (MP)
وضوح
سری Canon EOS DSLR تصاویری با کیفیت بالا، فوکوس خودکار سریع و تطبیق پذیری ارائه می دهد که آن را هم برای عکاسی و هم برای تولید ویدیو ایده آل می کند.
اتصال
وضوح (MP)
وضوح
سری بدون آینه Canon EOS M طراحی جمع و جور را با عملکردی شبیه به DSLR ترکیب می کند. این دوربین ها با داشتن لنزهای قابل تعویض، فوکوس خودکار سریع و سنسورهای تصویر با کیفیت بالا، برای مسافران و سازندگان محتوایی که به دنبال قابلیت حمل بدون به خطر انداختن کیفیت تصویر هستند، عالی هستند.
اتصال
وضوح (MP)
وضوح
سری Canon PowerShot دوربین های جمع و جور و کاربرپسند را برای عکاسان و علاقه مندان معمولی ارائه می دهد. آنها با مدل های مختلف از دوربین های ساده نقطه ای گرفته تا دوربین های زوم پیشرفته، راحتی، کیفیت تصویر قوی و ویژگی هایی مانند تثبیت کننده تصویر و ویدیوی 4K را ارائه می دهند.
اتصال
وضوح (MP)
وضوح
دوربین های نزدیک و دستی Canon برای عکاسی و فیلمبرداری دقیق و نزدیک طراحی شده اند. جمع و جور و آسان برای استفاده، فوکوس دقیق، تصویربرداری با وضوح بالا و قابلیت های ماکرو همه کاره را ارائه می دهند که برای وبلاگ نویسی، عکاسی محصول و نمای نزدیک خلاقانه عالی است.


